Robotics – SRCI
Interface de commande de robot standard

SRCI est une norme ouverte conçue pour la programmation et l’exploitation de robots dans un environnement PLC. Il facilite la programmation et l’exploitation standardisées des robots industriels et collaboratifs, quels que soient les fabricants d’automates ou de robots impliqués. SRCI y parvient en standardisant la communication entre le contrôleur du robot et l’automate.
SRCI est la prochaine étape dans l’évolution du marché de la robotique.
Concrètement, SRCI fournit des commandes de robot sous forme de blocs fonctionnels dans l’outil d’ingénierie de programmation de l’API. Cela signifie que les clients peuvent programmer l’ensemble de leur machine, y compris le programme du robot, dans le même environnement d’ingénierie. De plus, les systèmes basés sur SRCI permettent aux utilisateurs de créer leurs propres écrans de fonctionnement personnalisés, ce qui améliore considérablement l’expérience utilisateur du personnel d’exploitation et de maintenance.
Principe de fonctionnement
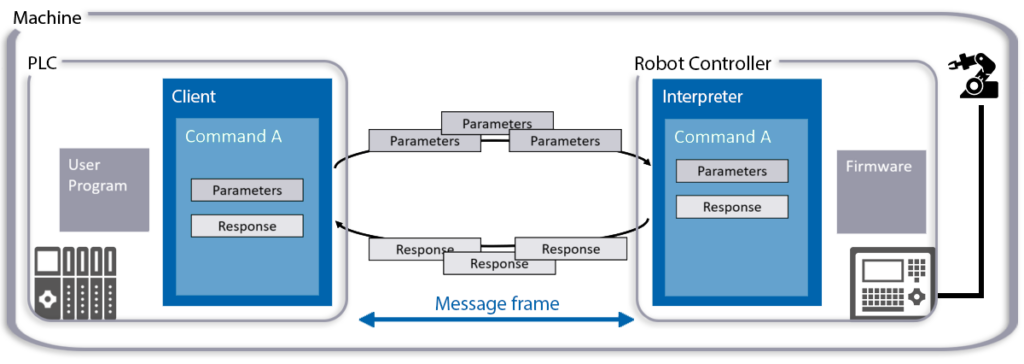
Le SRCI est basé sur un système d’appel de procédure à distance. Il nécessite deux composants logiciels principaux :
Serveur (interprète) :
Le serveur, également appelé interpréteur, réside sur le contrôleur du robot. Il gère les demandes entrantes du client (exécutées sur l’automate programmable ou PLC).
Client :
Le client, qui s’exécute sur l’automate, appelle les fonctions du serveur en envoyant des messages de commande avec leurs arguments correspondants au contrôleur du robot.
À la réception de la commande, le contrôleur du robot exécute la fonction spécifiée et renvoie des messages de réponse spécifiques à la commande.
La communication SRCI entre l’API et le contrôleur du robot est agnostique en matière de bus de terrain, ce qui signifie qu’elle peut être réalisée via PROFINET (le mode isochrone n’est pas nécessaire) mais aussi via d’autres bus de terrain.
Profils et fonctions
SRCI spécifie plus de 115 commandes, allant des commandes de déplacement de base (telles que les mouvements linéaires) aux commandes plus complexes telles que le contrôle de la force.
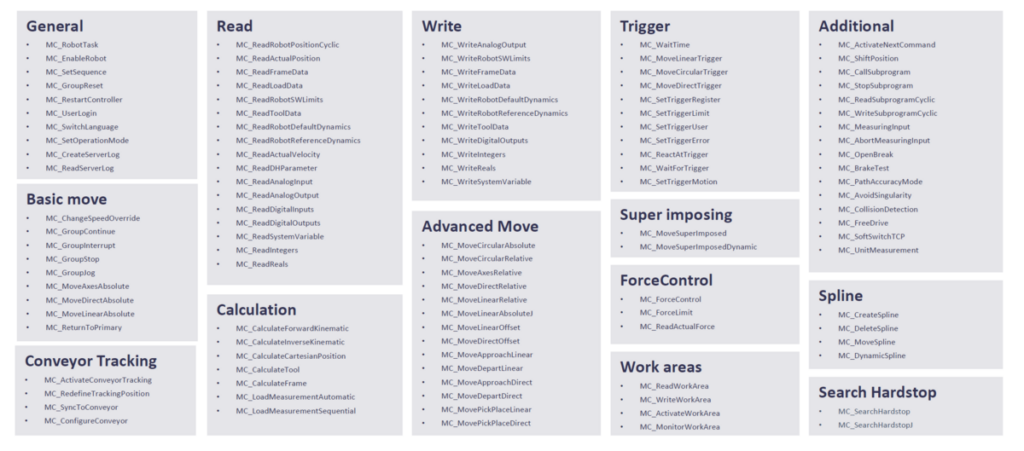
Pour utiliser une fonction SRCI, elle doit être prise en charge à la fois par le serveur et le client. Ces commandes sont classées en différents groupes :
Noyau de profil :
Fournit les commandes de base et les fonctionnalités de base de l’interface. Chaque implémentation SRCI prend en charge au moins les commandes de ce profil.
Commandes étendues et facultatives de profil :
Les fabricants peuvent ajouter individuellement des commandes de ces groupes à leurs implémentations.
Pour plus de détails sur la commande prise en charge par quel fabricant, consultez la carte des fournisseurs SRCI.